6月26日,威斯康星大学麦迪逊分校土木与环境工程系的陈思凯助理教授应邀出席第二十期“李楠研究小组系列学术邀请报告”,并就“混合交通环境下智能网联汽车运营:AI助力缓解交通拥堵与防止碰撞事故”这一主题进行了深入探讨。此次线上线下融合的报告会由李楠老师主持,吸引了来自清华大学及其他学术机构的10余位师生参加。

图1 本次报告活动现场
本次报告主要分为三部分。首先,陈博士剖析了在混合交通背景下智能网联汽车运营的现状和面临的挑战。紧接着,他重点介绍了运用AI以缓解交通拥堵和防止碰撞事故的研究方法及其在实践中的应用。最后,他介绍了他的课题组在其他相关方向的最新进展。
在报告的第一部分,陈博士重点强调了交通拥堵所引发的一系列问题,包括污染排放、油耗增长,以及对经济造成的损失,同时也提到了每年高达的交通事故死亡人数。这些问题都急需我们通过车联网和自动驾驶技术寻求解决方案。他详细讨论了车联网通过信息共享帮助驾驶员做出更优决策的同时,过多的实时信息可能对驾驶员造成干扰,这就需要自动驾驶的介入。然而,完全的自动驾驶可能导致过度保守的行驶速度。因此,他强调了寻找有效管理智能网联汽车(CAV)的策略是解决这些问题的关键。
在报告的第二部分,陈博士介绍了使用AI对交通进行管理的研究方法和应用案例。他首先讲解了两种AI方法——模仿学习和强化学习。他首先对两种AI技术——模仿学习和强化学习进行了解析,随后详细阐述了一种为多智能体系统设计的创新AI系统。他介绍了一种创新的集中控制框架——图形卷积Q网络(GCQ),这种方法融合了图形表示和强化学习的优势,相较于传统的规则模型,表现出更高的效率,且更充分地考虑了车辆间的交互意图。
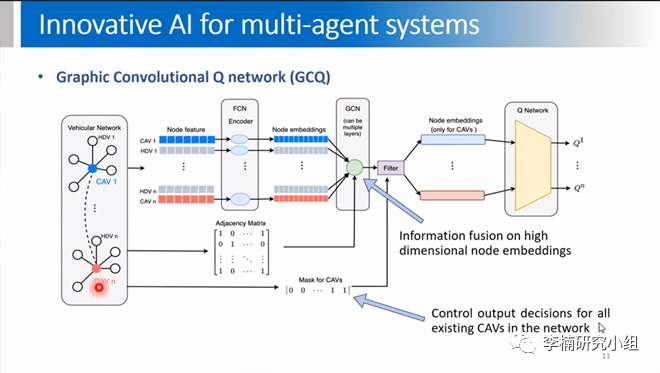
图2 图形卷积Q网络
接下来,陈博士详细介绍了如何利用GCQ结合CAV来缓解交通拥堵和防止碰撞事故的应用实例。首先,他指出在有瓶颈和无瓶颈的情况下,AI赋能的CAV可以分别有效地减弱交通冲击波和帮助人员驾驶汽车(HAV)形成有序队列,从而成功避免拥堵。同时,他强调了AI在防止碰撞事故方面的重要作用。在混合交通环境中,AI可以帮助规避由HAV可能造成的错误,例如驾驶员注意力不集中而导致的急转弯。陈博士的研究结果显示,对于CAV,采用减速和换道的策略,相比仅减速,能显著提高避免碰撞的成功率,提升幅度超过0.6。
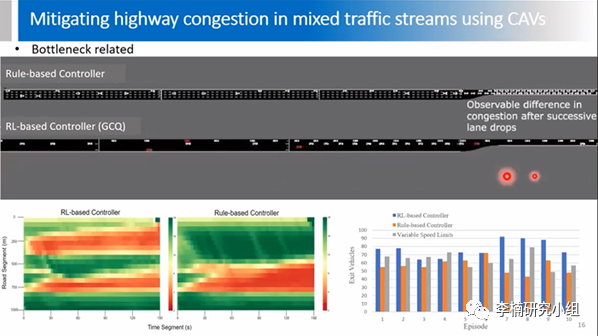
图3 AI助力缓解交通拥堵
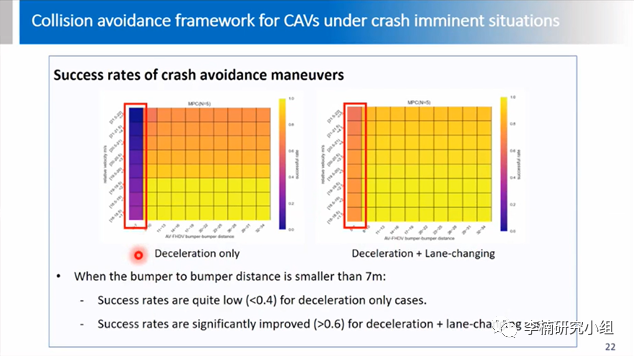
图4 AI助力防止碰撞事故
在报告的第三部分,陈博士分享了他的课题组在可解释的AI、人因工程和虚拟现实等研究方向的最新研究成果。他强调,随着CAV的发展日新月异,人、车、环境之间的交互关系也在经历着剧变。深入研究这些交互关系,有助于我们更为准确地理解如何打造出更加安全、舒适的交通环境。在报告的收尾,陈博士向观众展示了如何将科研成果转化为实际应用。他的课题组已经成功地在实际环境中对汽车模型进行了仿真测试,并对全尺寸的汽车实施了现场试验。他们正在积极探索如何将这些前沿技术推广应用到其他领域,如致力于为残疾人群提供服务。通过这些实践的应用,他们期望能在提升道路安全性、优化驾驶效率,以及改善驾驶体验等多个方面做出重大贡献。

图5 科研成果实际应用案例
